




Hvordan 3Dfindit blev en vigtig ressource i genbrug af robotarme

På mange industrianlæg står forældede robotarme ubrugte hen - de er ikke længere integreret i moderne produktionsarbejdsgange, men er stadig mekanisk funktionelle. Forskere undersøger i stigende grad, hvordan sådanne systemer kan bringes tilbage i produktiv brug - især af hensyn til bæredygtighed og smartere brug af ressourcer.
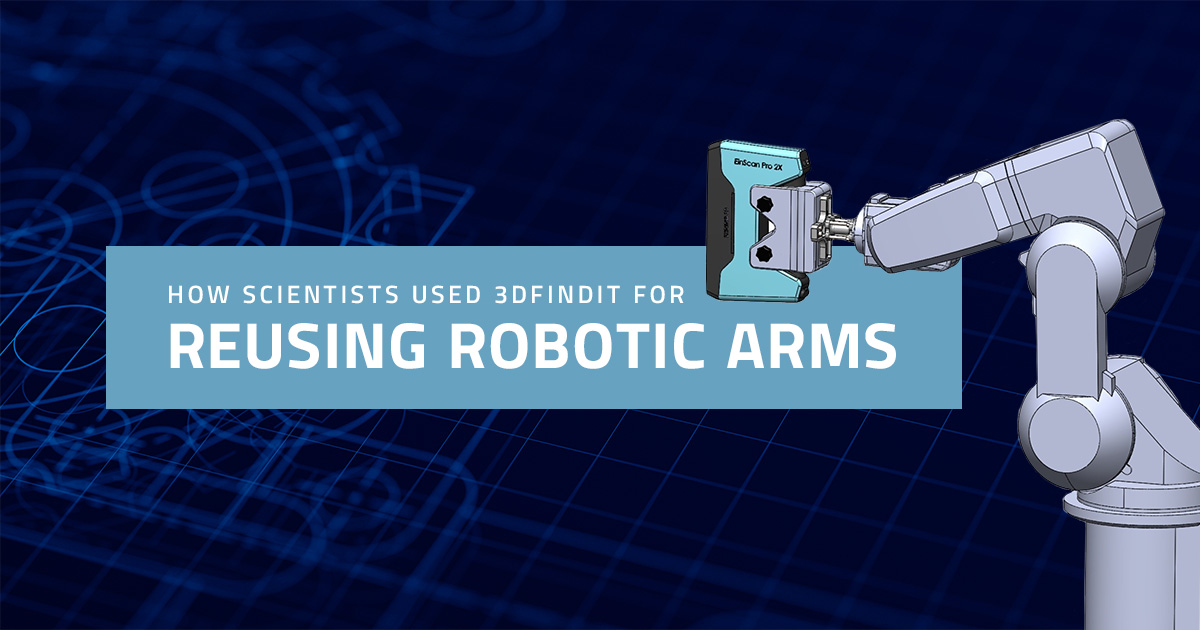
Et nyligt forskningsprojekt, ledet af Mirko Sokovic fra Ljubljana Universitet, er et overbevisende eksempel: En ældre industrirobot blev omkonfigureret til at bære og betjene en moderne håndholdt 3D-scanner - automatiseret, præcis og i en helt ny rolle: optisk kvalitetsinspektion gennem digital 3D-optagelse.
En leddelt robotarm kan inddrages i projekter, hvor de studerende lærer om programmering, kontrolsystemer og sensorer, hvilket forbedrer læringsoplevelsen. (Mirko Sokovic et al.)
Gammel hardware, nye muligheder
Den pågældende robotarm - en Mitsubishi model RV-3SDB-S15 - var aldrig designet til at udføre fine måleopgaver eller understøtte avanceret sensorudstyr. I mellemtiden er håndholdte 3D-scannere som EinScan Pro 2X fra Shining 3D bygget til manuel brug, ikke til robotmontering. Den centrale udfordring? Der er ingen standardmetode til fysisk at forbinde begge enheder.
Samtidig er akademisk og anvendt forskning under stigende pres for at innovere hurtigere - med begrænsede budgetter, stramme tidslinjer og høje forventninger til tilpasningsevne. Det betyder, at eksisterende værktøjer og komponenter skal genbruges intelligent i stedet for at blive kasseret eller udskiftet.
At forbinde to teknologier, der ikke passer sammen
Det centrale tekniske problem var at skabe en mekanisk grænseflade mellem scanner og robot - en, der ville være strukturelt stabil, geometrisk præcis og egnet til billig produktion. Gribere fra hylderne var enten geometrisk inkompatible eller ikke designet til denne type anvendelse. Det ville have været tids- og ressourcekrævende at bygge en skræddersyet løsning fra bunden.
Forskerteamet valgte en smartere vej.
- 3D-digitalisering (fotogrammetri) af komponenterne
- Reverse engineering af deres geometrier
- 3D CAD-modellering ved hjælp af SolidWorks
- Additiv fremstilling (FDM 3D-printning)
Ved at kombinere disse tilgange udviklede de en skræddersyet mekanisk adapter mellem de to systemer.
Løsningen med 3Dfindit: At finde, ikke genopfinde
Det var her, 3Dfindit blev afgørende som en ressource for eksisterende CAD-modeller af griberkomponenter. I stedet for at designe alt fra bunden brugte teamet 3Dfindit til at søge, filtrere og downloade en færdig gribermodel, der fungerede som udgangspunkt. De tilpassede den, så den passede til den håndholdte 3D-scanners specifikke geometri, og justerede den til 3D-printning - hvilket sparede både tid og ingeniørarbejde.
3Dfindit har vist sig at være et meget nyttigt ingeniørværktøj til at reducere søgetiden efter eksisterende produkter, men også til ændring og hurtig tilpasning af eksisterende produkter. De typer af søgninger, der tilbydes, er meget forskellige, og det samme er de forskellige formater, som modellerne kan downloades gratis i. En anden stor fordel ved 3Dfindit-platformen er, at brugeren kan gemme den oprettede modificerede 3D-model i databasen, så andre brugere også kan få gavn af den. (Mirko Sokovic et al.)
Platformens evne til at filtrere efter nøgleord, geometri eller filtype og til at tilbyde modeller i formater som SolidWorks var afgørende. Efter at have valideret designet uploadede teamet også deres tilpassede model tilbage til platformen - og delte den med fællesskabet.
En fungerende prototype - og en reproducerbar proces
Slutresultatet var en fuldt funktionsdygtig enhed:
- Den håndholdte 3D-scanner var sikkert monteret på robotarmen
- Den tilpassede griber blev 3D-printet i PLA ved hjælp af FDM
- Den fulde udvikling - fra scanning til samling - blev gennemført med minimal ressourceinvestering
Men ud over den tekniske succes illustrerer dette projekt noget bredere: hvordan kombinationen af digitale værktøjer og åbne dataplatforme kan muliggøre smidig, bæredygtig og omkostningseffektiv forskning. Især for universiteter, forsknings- og udviklingslaboratorier og nystartede virksomheder er genbrug af tilgængelig hardware og udnyttelse af fælles modelbiblioteker ved at blive et smart og skalerbart alternativ til dyr udvikling fra bunden.
3Dfindit som en del af et moderne forskningsøkosystem
I dette projekt gav 3Dfindit adgang til verificerede, modificerbare CAD-modeller og gjorde det muligt at gå fra idé til fysisk prototype hurtigt og effektivt. I moderne forskning og udvikling er teknisk smidighed altafgørende. Og platforme som 3Dfindit fungerer som den digitale værktøjskasse, der gør det muligt.
Er du studerende, underviser eller forsker? Deltag i 3Dfindit University Program og få gratis adgang til millioner af verificerede CAD-modeller for at sætte fart på dine projekter. Uanset om du laver prototyper, underviser eller udgiver - 3Dfindit hjælper dig med at finde, tilpasse og dele komponenter hurtigere.
- Spar tid
- Sæt skub i innovationen
- Lær med værktøjer fra den virkelige verden
Tilmeld dig nu - det er gratis.


